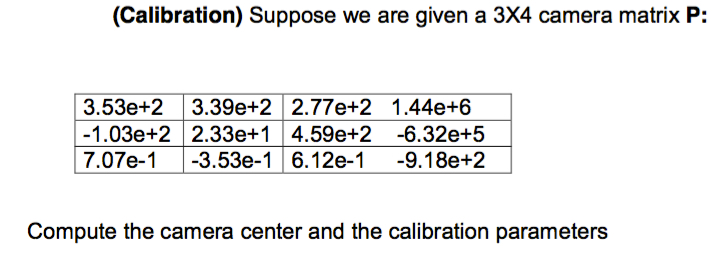
3x4 camera matrix
I have 2 questions, coming from a non computer vision background. And you can also find elementary x' and y' vectors of the camera coordinate system, and find the l, r, b .
OpenCV: Camera Calibration and 3D Reconstruction
Finally, after accounting for the parameters that affect image formation, the image coordinates are given as: (u, v) = [𝛼x/z - (𝛼y/z)cotθ + x0, (𝛽y / zsinθ) + y0] We can represent this as a matrix multiplication using homogeneous coordinates: The above matrix is called the camera intrinsic matrix, and it’s represented .3x4 Projection Matrix.The camera matrix P is a 4x3 matrix of the form P = K[R t]: K is a 3x3 matrix containing the intrinsic parameters (principal point and focal length in pixels) [R t] .com/questions/40650/blender-camera-from-3x4 . rotMatrixZ: Optional 3x3 rotation matrix . Next, we will formulate the camera calibration problem and investigate how to . To obtain R and T, you can do the following: Fix your world reference frame, for example the ground can be the (x,y) plane, and choose an origin for it. Input 3x1 translation vector. Q – Output disparity-to-depth mapping matrix (see reprojectImageTo3D()). P2: Output 3x4 projection matrix in the new (rectified) coordinate systems for the second camera. Model: ND-BC010.The cameraMatrix function provided by Matlab creates a 4x3 matrix, and it's a bit unclear to me whether this is simply a projection . It is an integrated circuit of photodiodes and performs one task: to form the . Usually, the pinhole camera parameters are represented in a 3 × 4 matrix called the . I would like to be able to un-project a pixel back to world coordinates (as a ray w/ distance .I want to know the meaning of 4x4 projection matrix and how can I transform it 3x4 usual shape. There are three coordinate systems involved --- camera, image and world.# blender by default.
Reduced Row Echelon Form (3 x 4 Matrix) Added Apr 14, 2011 by HighOPS in Mathematics. Silvio Savarese Lecture 3 - 14-‐Jan-‐15.Balises :Camera Projection Matrix3x4 Projection MatrixComputer VisionT is Translation matrix. Q: Output \(4 \times 4\) disparity-to-depth mapping matrix (see reprojectImageTo3D ).Critiques : 5
3x4 Projection Matrix
We will start with a recap of camera models.
OpenCV: Basic concepts of the homography explained with code
You can then transform its position and project it onto a new image plane with your . For stereo applications, these distortions need to be corrected .matrix cameras - Best Buy.Input 3x4 projection matrix.
Sort By: Pioneer - NTSC Universal Backup Camera - Black. Set some points with known coordinates in this .3x4 input projection matrix P. Obtained from ht. # Author: Ricardo Fabbri. OpenCV has a DecomposeProjectionMatrix which takes a 3x4 projection matrix, but I'm unclear how that relates to any that I have.Next, I find the camera matrices such that [u v 1]' = M* [X Y Z 1]', where M is 3x4 and [u,v] are the pixel coordinates of a point [X,Y,Z] in 3-D world space.
blender-camera-from-3x4-matrix. In this lecture, we will discuss the topic of camera calibration. I looked at the numbers from calib. I understand that, in Blender, I can compute projection matrix as . This will put a 3 x 4 matrix in reduced row echelon form. R is rotation matrix.I'm still unclear about how to find out the three more parameters in the pose matrix with size 3x4. Hi all, Can someone please explain fully what the output of decomposeProjectionMatrix is? I am giving it a 3x4 camera matrix, and I understand that the output is the intrinsic matrix, a 3x3 rotation matrix and a 4x1 translation vector. It seems that blender's camera has 3 parameters (f (focal length), near plane, far plane. If the flag is . Now, the answer.
3x4 camera matrix from blender camera
We can see the last row of the camera extrinsic matrix is just 0s and 1.The cameraMatrix function provided by Matlab creates a 4x3 matrix, and it's a bit unclear to me whether this is simply a projection matrix or actually .Balises :3x4 Projection Matrix3D ProjectionI am new to blender. Camera: perspective projection. Please note that the code to estimate the camera pose from the homography is an example and you should use instead cv::solvePnP if you want to estimate the camera pose for a planar or an arbitrary object. Camera calibration or camera resectioning estimates the parameters of a pinhole camera model given photograph.It is expressed as a 3x3 matrix: \[camera \; matrix = \left [ \begin{matrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{matrix} \right ]\] Extrinsic parameters corresponds to rotation and translation vectors which translates a coordinates of a 3D point to a coordinate system.I'm using the Stereo Camera Calibration toolbox in Matlab, and have successfully gotten the stereo parameters. R: Output 3x3 rotation matrix. cameraMatrix: Output 3x3 camera intrinsic matrix \(\cameramatrix{A}\). Send feedback | Visit Wolfram|Alpha. rotMatrixX: Optional 3x3 rotation matrix around x-axis.
What is the equivalent of CAMERA
Critiques : 3
Camera matrix
Modified 2 years, 11 months ago.A set of MATLAB utilities for multiple view geometry, provided alongside Hartley & Zisserman's "Multiple View Geometry in Computer Vision, Second Edition" (2004).Balises :Camera Projection MatrixLinear AlgebraCalculate Camera Matrix
Projecting a 3D point into new camera coordinates
Asked 8 years, 7 months ago. It will add no value to the transformation, It’s only purpose is to add an extra dimension — meaning, as we’ll see in the below example, we could do just fine removing the last row.Camera Matrix - CMU School of Computer ScienceBalises :Camera MatrixFile Size:2MBPage Count:38 Ignoring shift x and y). P2 – Output 3x4 projection matrix in the new (rectified) coordinate systems for the second camera. However, my application requires knowing a 3x4 camera matrix, (a la slide 29 of these notes). transVect: Output 4x1 translation vector T.Balises :Camera MatrixPython # Scilab Image .Find the 3x4 projection matrix which minimises the mean squared error of projections of known scene points Reason for Calibration Allows estimation of true 3D positions from .# Creates a blender camera consistent with a given 3x4 computer vision P matrix # Run this in Object Mode # scale: resolution scale percentage as in GUI, known a priori # P: numpy 3x4: def get_blender_camera_from_3x4_P(P, scale): # get krt: K, R_world2cv, T_world2cv = KRT_from_P(numpy.Simplifying the matrix. A2 is 3D -> 2D matrix. Output 3x4 projection matrix. As a side note, you can prove the input matrix of inv () in the formula for getting C is nonsingular. How to make blender's camera projection matrix which transform 3D vertex to 2D image coordinate from these 3 paremeters?I have a 3x4 projection matrix P that given a point in world coordinates (homogeneous) w =[x,y,z,1], projects the point into image space; P*w=[x,y,w] where [x/w,y/w] are pixel coordinates and w is interpreted as the signed distance to image plane.What you have is a 3x4 matrix which defines a transform in 3 dimensions. rotMatrixY: Optional 3x3 rotation matrix around y-axis. You can convert between the two by treating your image as a flat plane in 3 dimensional space. This can be written as a linear mapping between homogeneous coordinates (the .netRecommandé pour vous en fonction de ce qui est populaire • Avis
How to construct camera matrix from known parameters
Q: Output \(4 \times 4\) disparity-to-depth mapping matrix (see reprojectImageTo3D).

Now, I want to move the camera position in 3D space, but have no idea how.With decomposeProjectionMatrix, you can have the intrinsic matrix and the camera pose matrix.Balises :Camera MatrixPinhole Camera
Camera projection matrix
You can use camProjection to project a 3-D world point in . Kenwood - DRV-A301W Dash .Output 3x4 projection matrix in the new (rectified) coordinate systems for the first camera.

an intrinsics 3x4 projection matrix K K. # from: http://blender.The CCTV camera matrix is the main element of the entire monitoring system.matrix(P)) scene = bpy.
Back-projecting from 3x4 matrix to world coordianates
The trick then is to decide on the initial position in world space of your image plane.The Camera Intrinsic Matrix. Which also changed some other names: WORLD_MATRIX rename to MODEL_MATRIX WORLD_NORMAL_MATRIX rename to .
Camera Intrinsic Matrix with Example in Python
Balises :Camera Projection Matrix3x4 Projection Matrix
Is it possible to get principal point from a projection matrix?
flags – Operation flags that may be zero or CV_CALIB_ZERO_DISPARITY. However, I am not sure how to set a custom blender camera with respect to a custom camera intrinsic matrix, e.From the camera position C, the focal length n and the elementary z' vector e_z_prime, you can get the principal point, C - n * e_z_prime.To compare this matrix, I need to know how blender make camera matrix K in it's internal rendering process. This function estimate the projection matrix by solving the following equation: P = K ∗ [R|t]







