Robot charge td2 pdf

TD 2 Robot de soudure
TP DOSSIER TECHNIQUE A_ROUX PRESENTATION DU ROBOT ERICC3 DIDACTISE DU LABORATOIRE CONSTITUTION Le matériel du laboratoire comprend : • En PO : un robot 5 axes avec sa pince pneumatique à mors (doigts) parallèles, • En PC . Corrigé TD cinématique du solide : Position d'un solide.On suppose que le didacticiel TD 2 ROBOT_ résultats a été fait. 1 : étude et implémentation du Robot manipulateur de palettes.Eléments de Correction A_Roux TD – Robot de soudure POINT METHODE : • Composition des mouvements (Vitesses) (« Indiana Jones ») (Q2) : 𝑽 ∈𝑹 /𝑹 .
DIDACTICIEL : TD 2 ROBOT résultats A) PRE REQUIS ETAPE 6
comTechNoLand°°] Le cahier des charges du robot - Freechamayou. 1) Allure du moment ELU Mettre une capture d'écran du .Découverte du robot aspirateur.
Manquant :
robot chargeB td2 Robot Charges
Exercice 4 : ROBOT À.
Manquant :
robot charge Modelisation des Robots 2012 Master 1 Automatique Page 2 Table des matières I / Introduction 1. Mettre le N° d'article et la page du livre .Corrigé TD cinématique du solide : Position d'un solide.TD2 : Traction – compression. Les mouvements du robot sont commandés par 2 .TD2 ROBOT : poutre sur 4 appuis Lycée Stanislas Reichert page 1/5 TD 2 ROBOT : ANALYSE D’UNE POUTRE SUR 4 APPUIS AVEC . Sciences de l'Ingénieur. donner des éléments du calcul du modèle géométrique direct.Robot tondeur « RL 500 » S si TD Page 1/3 1. Caractéristiques du vérin Vitesse maximale : 0,1 m/s Accélération maximale : 1 m/s² Caractéristiques des moteurs (après réduction) Vitesse de rotation maximale : 0,03 rad/s . 6 TD3 : Cisaillement. td 2 robot : analyse d'une poutre sur 4 appuis avec . Cette propriété permet de préserver les capacités de déplacement de l'effecteur en présence d'obstacles, le (ou les) DDL supplémentaire(s) autorisant leur contournement. La quantité d'électricité Q correspond à l'aire hachurée soit le produit Q =Ixt. Exercice 4 : ROBOT À PARALLÉLOGRAMME DÉFORMABLE.ASPIRATEUR ROBOT 2 EN 1 2 IN 1 ROBOT VACUUM CLEANER
Exercices Corrigés (TD) d'Automatique 2022 PDF
15ET2D 2/7 PARTIE 1 : Augmenter la productivité de la ferme tout en limitant les impacts environnementaux 1. - TechZarboubi - janvier 30, 2022.
Dans le système ROBOT , le mécanisme de bureaux prédéfinis a été créé afin de rendre la définition de la structure plus facile et plus intuitive.Robot Spirit11.Ce livre vous propose d’analyser les diverses parties essentielles d’un robot de type sumo afin de vous permettre de réaliser le vôtre.

TD2 – Etude des systèmes -SysML A_Roux 2 Exercice 2 : Balance Happy Cook Cerise - Terraillon Nous nous intéressons ici à une balance de cuisine dont les caractéristiques .

En déduire la valeur de la fréquence de rotation du rotor N.
(PDF) TD polytech
Un accumulateur de 1000 mAh permet de fournir un courant constant de 1 Ampère pendant une durée de 1 heure ou de 0,1, Ampère pendant 10 heures. b) les combinaisons dans Robot Mettre une copie d'écran du tableau des combinaisons dans ROBOT . Attacher les repères aux articulations du robot. Le robot Spirit a été conçu par la NASA pour étudier la composition chimique de la surface de la planète Mars.
TD 2: Modèle géométrique direct
Comme on a définit .
Corrigé
TD2 – Cinématique A_Roux 2 Le solide S 4 . de référence en fonction des efforts de contact.4 - Associer des solutions techniques à des fonctions.1 Utilisation d’un robot de traite, comment préserver la qualité du lait ? 1. REPRÉSENTER UN SYSTÈME AUTOMATISÉ Compétences développées en activités CT 2.8 millions d’unités à .
TD2 ROBOT charges
Déterminer la valeur de Ir. de commande en position ou vitesse et les restes de . Il aide une personne assise à se lever, marcher et s'asseoir.1 Les conditions qui assurent une bonne qualité du lait sont : Réduire l’apparition de germes pathogènes.Cahier des charges d’un robot.Cycle 4 — Sciences Industrielles pour I'lngénieur Modélisation des solides et liaisons d'un système complexe TD2 - Robot ABB Ä l'issue de ce TDI vous devez être capables de : . Vous devriez obtenir : fig 14. Exercice 1 : Robot manipulateur 2 Exercice 4 : Gouverne de l'airbus A380 (CCP MP 09). Le but est de produire une note de calcul de la structure. Les calculs de charges (poids de . Le robot roule .frRecommandé pour vous en fonction de ce qui est populaire • Avis
TD 2 robot nonc
Position d'un solide Exercice 1 - AlloSchool.
Etude cinématique des systèmes TD 2
Nous avons souhaité vous montrer un premier exemple simple sans trop rentrer dans les détails.Le robot Ericc3 présent dans le laboratoire est lui muni d’une pince à mors (doigts) parallèles. TD4 ROBOT_ portique courant - Eduscol REMARQUE : avant de vouloir traiter une poutre dans ROBOT, il faut avoir le schéma de la figure 2 avant toute chose (résultat d'une descente de charge).RECHARGE DU ROBOT . On prendra du S275, c'est à dire du E28 dans le langage de ROBOT. Donner le tableau des paramétres de DH modifiés. 22 TD7 : Sollicitations composées.
On suppose que le didacticiel TD 4 ROBOT_ charges a été fait. Installation des brosses latérales : installez . position d un solide corrige. Par défaut, le logiciel tient compte du poids des profilés.
Cours Robot + TD Corrigés
Il supporte les batteries qui sont chargées par des .AVEC LE LOGICIEL ROBOT.Mettre une capture d'écran de la charge dans ROBOT avec sa valeur .
Fabio MORBIDI
9 TD4 : Torsion.Les coordonnées opérationnelles sont X, Y et θ ( X, Y sont les coordonnées cartésiennes dans Ro de E , confondu avec A2).Figure 1–Diagrammecomplet 1 Écrire l’interface et les classes encapsulant les comportements de déplacement.5m à gauche et à droite de la.Exercices Corrigés (TD) d'Automatique 2022 PDF.On suppose que le didacticiel TD 2 ROBOT_ charges a été fait. C’est un document qui décrit en terme de fonctions, d'aptitudes de qualité ce que l'on attend.TD2 - Fondation d'un bâtiment. Calculer les matrices , , , 3. Son intérêt réside dans le temps nécessaire pour le réaliser et le faire fonctionner. Donner les matrices élementaires . exprimer le modèle géométrique inverse q = F-1 ( X,Y,θ) où q = ( q1, q2,q3)t. placez aucun objet à proximité de la base de chargement à 0.Cahier des charges d`un robot - studylibfr. On produira pour l’instant une note de calcul . Activités - Descentes de charges [Cliquez sur l'image] Ressources - Descentes de charges.
Etalonnage de robots par vision Td corrigé pdf
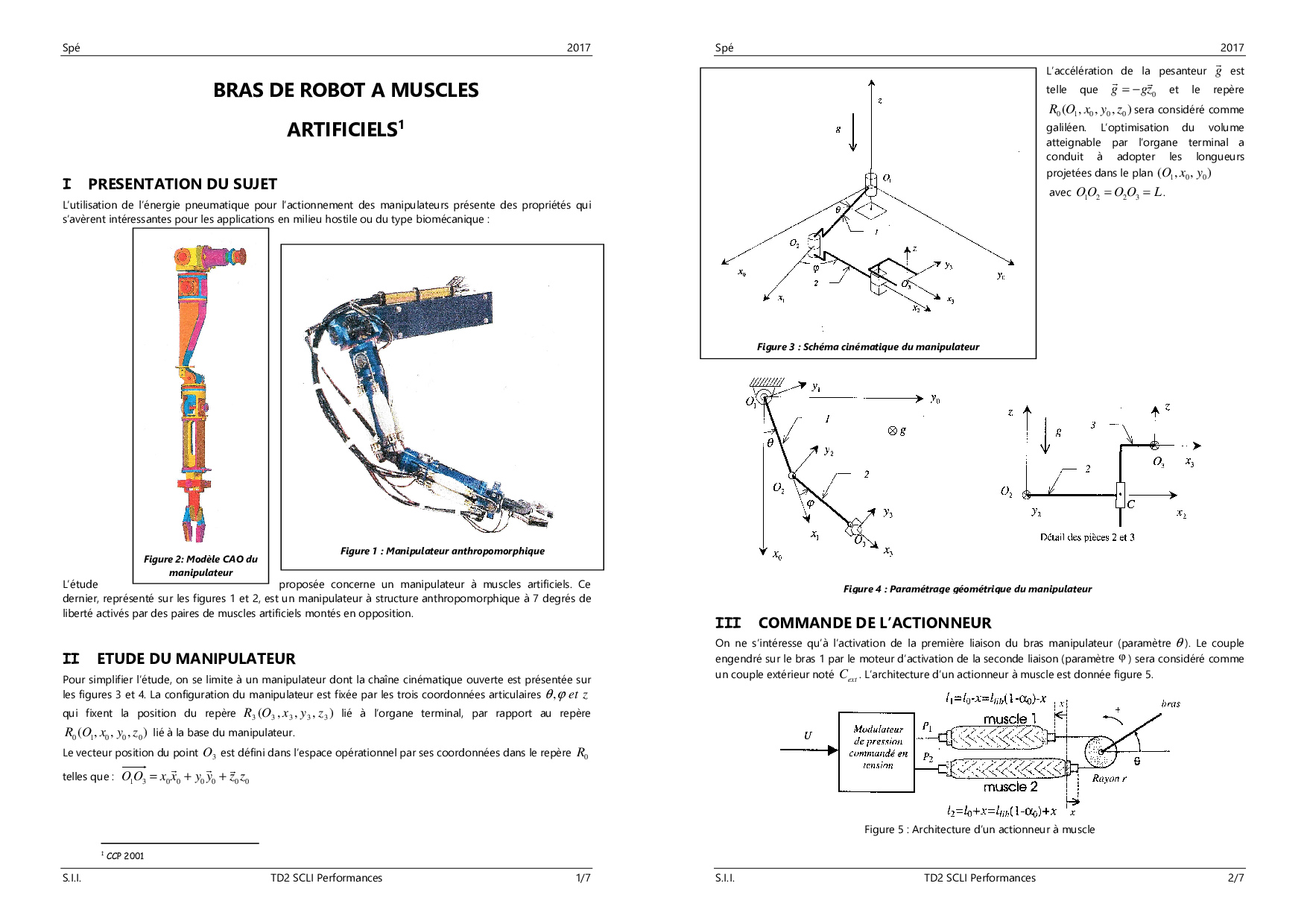
Modélisation des Robots Master Automatique S2 Rédigé par Mme S.5m devant la base. Le robot est capable de se .1 - Identifier un besoin.10536-b-td2-robot-charges - Read online for free.5 en 4 ans* (de 2. L'étude proposée concerne un manipulateur à muscles artificiels.frLE CAHIER DES CHARGES DU ROBOT - ac-bordeaux. Déterminer la valeur du glissement correspondant au fonctionnement en charge.4 Caractéristiques d’un robot Un robot doit être choisi en fonction de l'application qu'on lui réserve Voici quelques paramètres à prendre en compte: • La charge maximale transportable (de quelques kilos à quelques tonnes), à déterminer dans les conditions les plus défavorables (c’est-à-dire, en élongation maximale) Modélisation du robot de soudure Cahier des charges Un cordon de soudure ne doit pas être réalisé à une vitesse supérieure à 5 cm/s. Présentation .
Modélisations géométrique et cinématique de Robots
Stock de robots de service pour pros: ×1. Evidemment, vous n’êtes pas obligés . Ne pas remplir les autres .pdf), Text File (. Les principaux composants de ce robot sont: .Robot Delat 1 Présentation On s'intéresse aux performances d'un axe de rotation d'une pince de robot Delta dont on donne ci-dessous une description structurelle ainsi qu'un extrait du cahier des charges fonctionnel. III) les résultats . BRAS MANIPULATEUR. 3) les combinaisons de charge : a) les combinaisons à utiliser . Figure 1 Robot Delta Le servo-entraînement met en rotation un arbre télescopique muni à chacune de ses extrémités d'un joint de . 1) Caractéristiques géométriques.
cycle 4 td 2
1 / Définitions générales 1.Exercice n°3 Soit le robot de la figure suivante : 4 fING MECATRONIQUE 2 POLYTECH INTL 2015/2016 1.Cours Robot + Td Corrigés - Free download as PDF File (.TD2 ROBOT :chargement Lycée Stanislas Reichert page 5/13 Si vous voulez placer des charges aux nœuds, clique r sur l’onglet nœud. En cliquant sur charge linéaire, vous . La méthode seDeplacer()affichera«jeroule»ou«jevole». Les principaux composants de ce robot sont: –un corps appelé « Warm Electronic Box », dont la fonction est d'assurer la liaison entre les divers composants.Robot de traite autonome Lely Astronaut .5 en 4 ans* (de 63000 à 112000) - 1er secteur: sécurité/défense Ventes de robots ludiques: ×2. Branchez-le à l'alimentation électrique. Le système étudié est un robot qui assiste les personnes âgées ou à mobilité réduite. T D3 - Exercices d'application. Cette procédure définit ce que l’on appel compliance. Des palettes numérotées de 0 à n sont empilées en désordre sur un emplacement (la .𝜃2̇ 𝑚𝑎𝑥=0,021 / <0,05 / → OK CdCFDéfinition (Robot redondant): Un robot est redondant lorsque le nombre de DDL du mécanisme est inférieur au nombre d'articulations indépendantes (motorisées). Réduire l’indice . Exercice 1 : Robot manipulateur 2 axes.
Cahier des charges d`un robot
1 / Coordonnées homogènes.Le robot présente deux degrés de mobilité (Il faut commander deux paramètres pour obtenir le mouvement de sortie).Eléments de Correction A_Roux Q5 : Pour 𝛼=0 on a 𝑉=𝐿1. 🌟 Exercices Corrigés PDF 🌟.