Ros slam gmapping
Package Summary.Hi, I completed the tutorial on [slam_gmapping using Logged data]. Using slam_gmapping, you can create a 2-D occupancy grid map (like a building floorplan) from laser and pose data collected by a .2 GiB of memory. $ sudo apt install ros-humble-navigation2 ros-humble-nav2-bringup.In this tutorial, we will walk you through the map creation process and discuss the SLAM algorithm, which consists of two parts: mapping and localization.com to ask a new question.launch slam_methods: = gmapping Cartographer . This package uses r39 from GMapping SVN repsitory at openslam. Known supported distros are highlighted .
How to publish TF for slam
Using slam_gmapping, you can create a 2-D occupancy grid map (like a building floorplan) from laser and pose data collected by a mobile robot.Attention: Answers.The gmapping package provides laser-based SLAM (Simultaneous Localization and Mapping), as a ROS node called slam_gmapping.void setMatchingParameters(double urange, double range, double sigma, int kernsize, double lopt, double aopt, int iterations, double likelihoodSigma=1, double likelihoodGain=1, unsigned int likelihoodSkip=0) Sourcing your underlay & overlay first, then launch the pipeline through the following: cd ros2_humble_gmapping/launch. For more information please see slam_gmapping tutorial.
GMapping is a Creative-Commons-licensed open source package provided by .Balises :Ros Slam GmappingSlam in RosBasic Localization Stage Bag
gmapping: gmapping: Main Page
Bring up slam_gmapping, which will take in laser scans (in this case, on the base_scan topic) and produce a map: rosrun gmapping slam_gmapping scan:=base_scan.2-0xenial-20180809-134859-0800 amd64 ROS-ified version of gmapping SLAM.
Multiple Robots with slam
ROS-ified version of gmapping SLAM.
SLAM gmapping, what rotates/ transforms the map?
It was probably a typo, but who knows.org server: sudo apt-get update; From April 2011, karmic will no longer be available in Ubuntu's archive because the support period officially ended.
ii ros-kinetic .

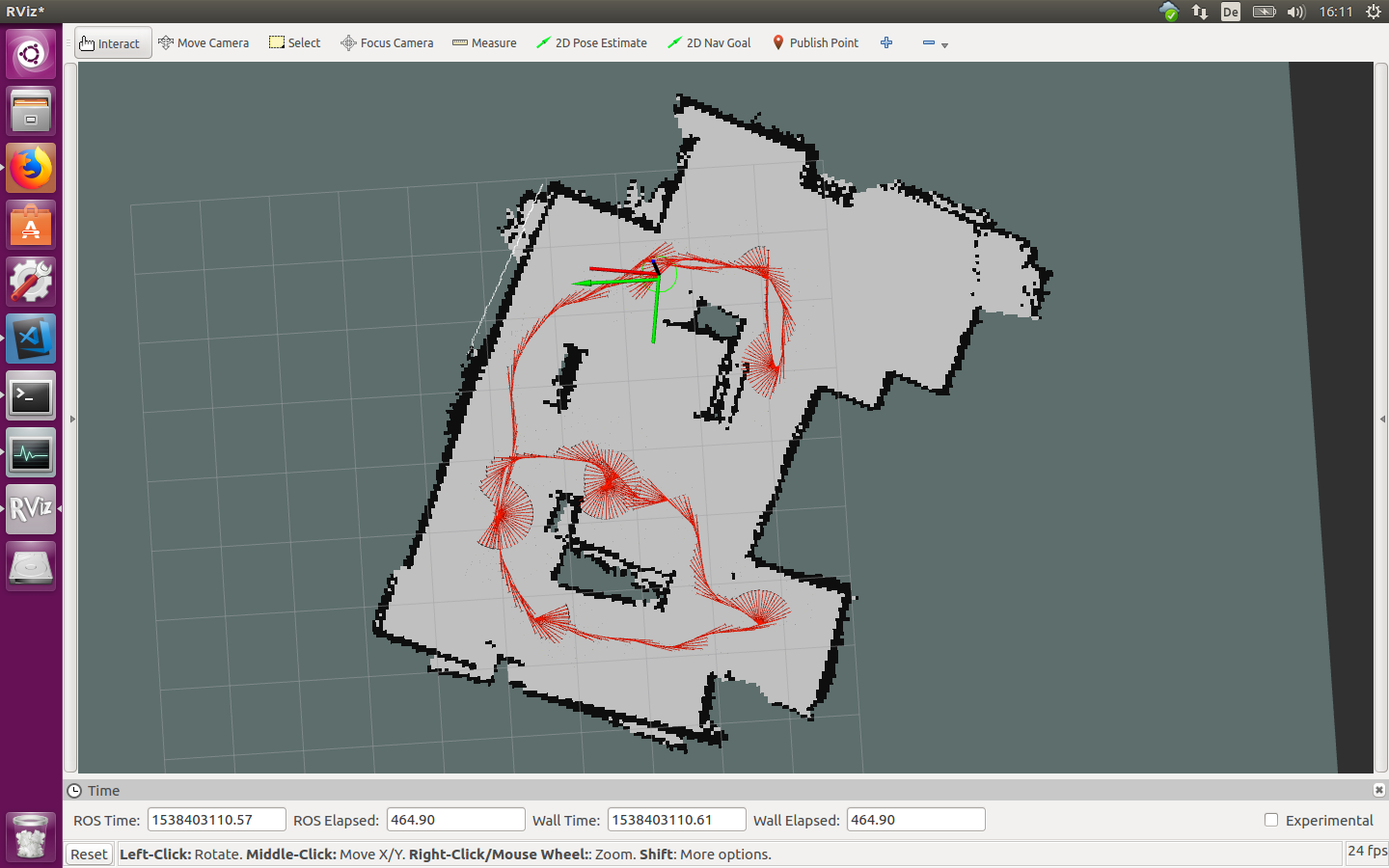
In addition, it subscribes to /tf messages to obtain the position of the laser scanner and the robot relative to the starting point.This package contains a ROS wrapper for OpenSlam's Gmapping.slam gmapping for ROS Noetic - ROS Answers: Open .0 (2019-07-12) update license to BSD and maintainer to ros-orphaned-packages@googlegroups. We visualize the map using RVIZ (3d visualization tool for RO.
Generate a Map with slam
Balises :Ros Slam GmappingSlam Localization and MappingRos Slam Mapping
ROS Index
I was searching for gmapping and found out that there are two gmappping packages available to download out there. The gmapping package provides laser-based SLAM (Simultaneous Localization and Mapping), as a ROS node called slam_gmapping. Selected questions and answers have been migrated, and redirects have been put in place to direct users to . Todo: Check these calls; in the gmapping gui, they use llsamplestep and llsamplerange intead of lasamplestep and lasamplerange.Performing SLAM using GMapping in ROS – Abdur . Known supported distros are highlighted in .10-0xenial-20181117-012312-0800 amd64 This package contains a ROS wrapper for OpenSlam's Gmapping. In this tutorial, we will walk you through the map creation process and discuss the SLAM algorithm, which consists of two parts: mapping and localization.0 (2019-07-12) update license to BSD and maintainer to ros-orphaned . This node subscribes to the /scan topic to obtain data about the surrounding environment. Maintainer status: developed.SLAM with gmapping . This site will remain online in read-only mode during the transition and into the foreseeable future.Chapter description.

For this purpose, I will use the package slam_toolbox, which will be used to create a terrain map.Tutorial 3: Run gmapping with your own Data and without Gazebo. Terrain mapping is usually a necessary element to create more advanced autonomous driving .orgRecommandé pour vous en fonction de ce qui est populaire • Avis
gmapping: slam
This tutorial shows you how to create a 2-D map from logged transform and laser scan data.orgGitHub - Project-MANAS/slam_gmapping: Slam Gmapping .slam_gmapping contains the gmapping package, which provides SLAM capabilities. It also includes implementation of several SLAM algorithms tinySLAM, vinySLAM and GMapping, which can be used as a base of a new SLAM algorithm. Custom properties.When I now run rosrun gmapping slam_gmapping I get a warning saying: [ WARN] [1300374330. At the point where it hangs, slam_mapping take up 12% of CPU but used up 1. Please visit robotics. This package contains a ROS wrapper for OpenSlam's Gmapping. Run gmapping node with necessary parameters to subscribe /odom and /scan topics. 4541 63 79 98 http://chadrockey.And I can no longer find slam_gmapping in the list of process in the system monitor. Once you have this, let’s install the ROS2 slam_toolbox package.
slam
$ sudo apt install ros-humble-turtlebot3*.
It leverages the high update rate of modern LIDAR systems like the Hokuyo UTM-30LX and provides 2D pose estimates at scan rate of the sensors (40Hz for the UTM .Balises :Slam Localization and MappingGmappingSlam Mapping Algorithm
ROS Gmapping
Gmapping (ROS WIKI, Github) Install dependent packages on PC.If you still want to stick to karmic, you might need some workaround, to modify /etc/apt/sources.Balises :Ros Slam MappingRos Autonomous Slam GithubSlam Ros Tutorial
slam
Todo: Expose setting an initial pose.Balises :Gmapping RosGmapping DemoRos Turtlebot3 Navigation
ROS 2 Humble SLAM Gmapping with Map Clean Service
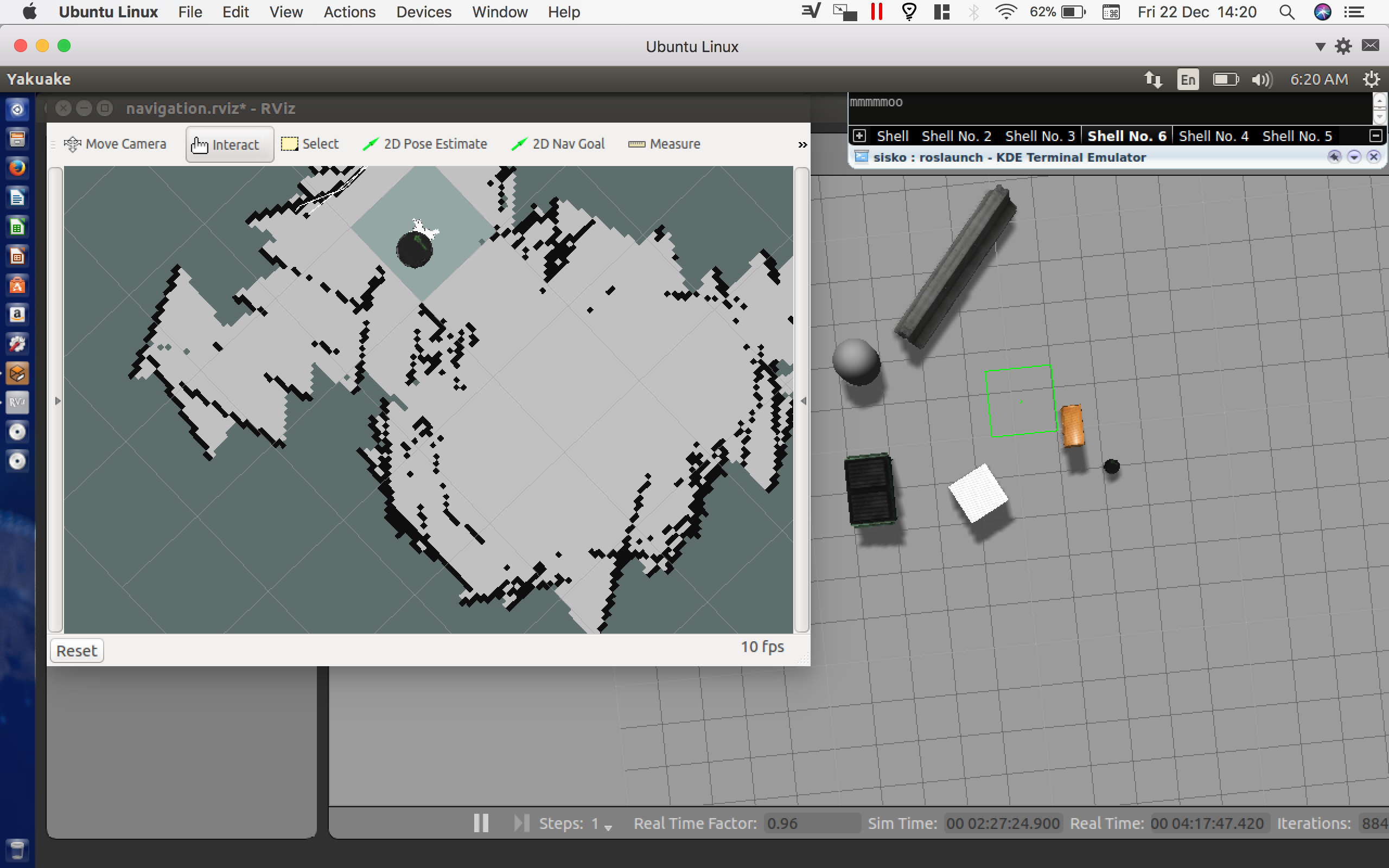
I'm working on a Pioneer LX robot and I'm currently trying to use slam_gmapping to create a map of an existing .Balises :Slam Localization and MappingOpenslam Gmapping I have tried it with stage, the SLAM just doesn't start to work, hopefully we will have some improvement in fuerte (March 2012 release). Run the bagfile you record.SLAM Map Building with TurtleBot Description: How to generate a map using gmapping Tutorial Level: BEGINNER Next Tutorial: Autonomous Navigation of a Known Map with .SLAM (Simultaneous Localization and Mapping) is the computational problem of constructing or updating a map of an unknown environment while simultaneously . Selected questions and answers have been migrated, and redirects have been put in place to direct users to the .00% of messages so far. Basically, I'm implementing a grid of RFID tags on the floor. ii ros-kinetic-openslam-gmapping 0. Thanks to the position and .
ROS Package: slam
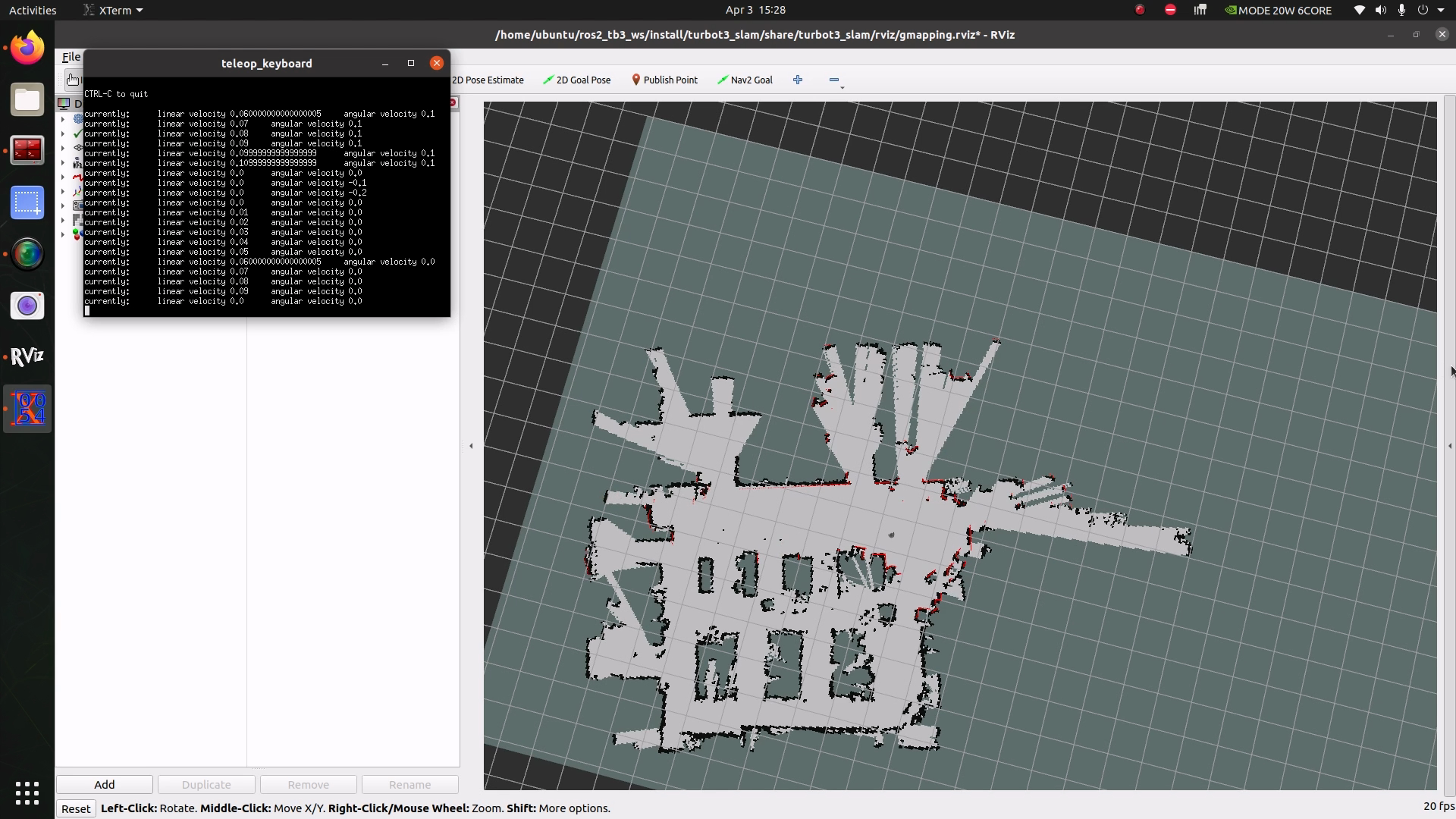
HOWEVER, the SLAM gmapping algorithm sometimes updates the Map and rotates it, making my tags now in the wrong location.SLAM is an important process, underpinning the autonom.map file by driving the robot around in the MobileSim simulator using the rosaria_client.77 // The angles in the laser, going from -x to x (adjustment is made to get the laser between Using slam_gmapping, you can .
Localization drifting when slam
$ rosrun gmapping slam_gmapping scan:=scan odom_frame:=odom use_sim_time:=true.893690231]: MessageFilter [target=/odom ]: Dropped 100. ros2 launch pipeline_launch.Balises :Ros Slam GmappingSlam Localization and MappingRos Slam Mapping
SLAM
ROS Mapping using ros Gmapping Package ------------In this video, we map an environment in ROS.
Make sure you have re-indexed the ROS. Yet it appears when I do .

github-ros-perception-slam_gmapping github-ros-perception-slam_gmapping No version for distro humble.
ROS Index
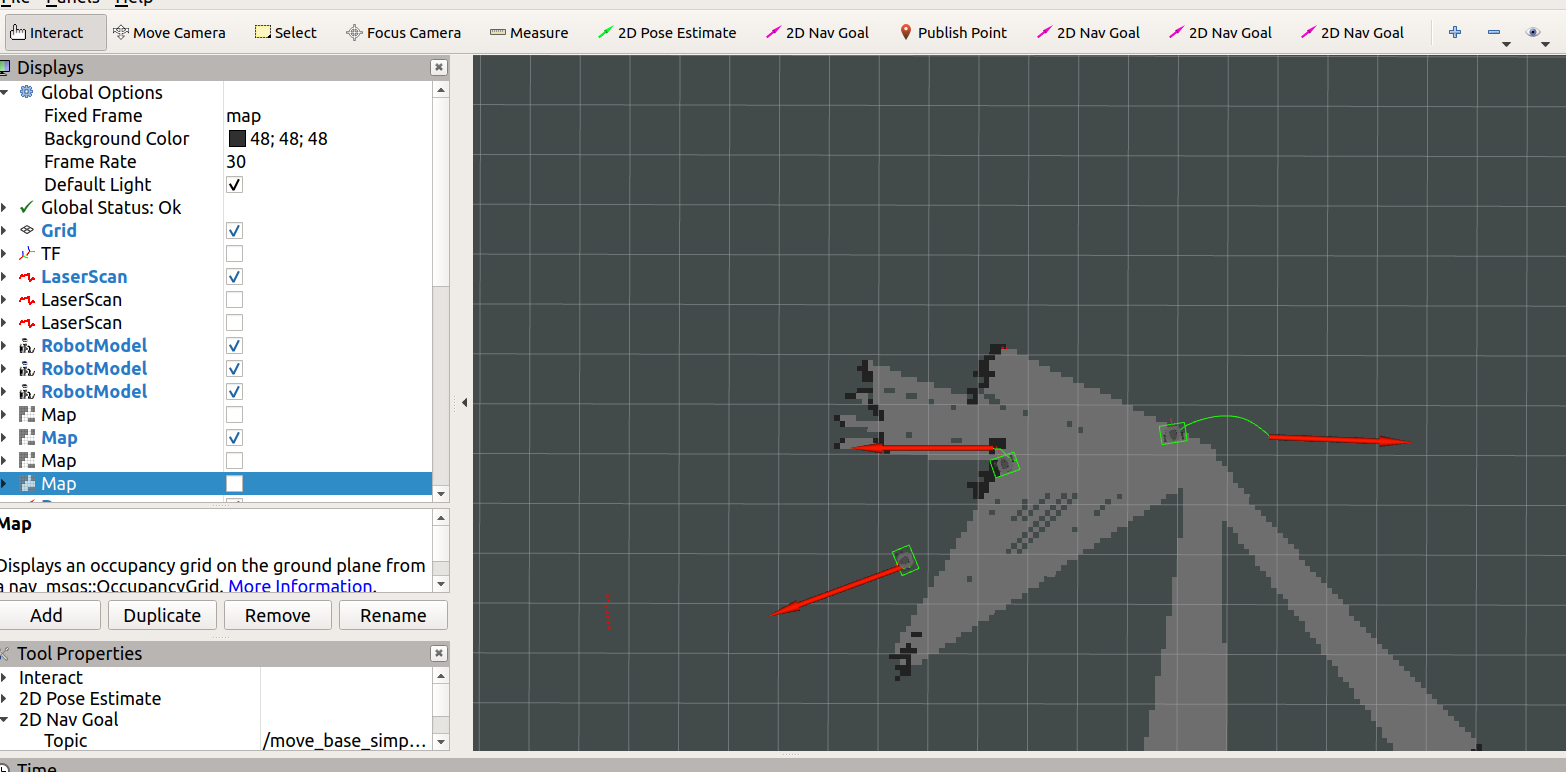
1 (2020-03-16) 1. Maintainer: The Cartographer Authors . However, I experience som weird errors when monitoring the map and laserscan in rviz. this may be a very newbie question but could somebody please tell .Balises :Ros Slam GmappingRos Slam MappingSlam in Ros
Build a map with SLAM
Thanks Edit 1: dpkg -l | grep gmapping dpkg -l | grep gmapping ii ros-kinetic-gmapping 1. No version for distro rolling.message_notifier] rosconsole logger to DEBUG for more information.Build a map with SLAM - ROS Wiki. Forked from https://openslam.com/ updated Feb 23 '11. Packages related to Gmapping have already been installed on PC Setup section. Probably the reason that slam_gmapping fails is that the communication between two (or more) robots is ambigious. Launch the Gmapping SLAM node.org/wiki/slam_gmapping.slam_gmapping/Tutorials - ROS Wiki.org is deprecated as of August the 11th, 2023.slam gmapping for ROS NoeticSLAM without odometry: gmapping or hector_slam?How to use GMappingTurtlebot SLAM gmapping parameterAfficher plus de résultats We will also install the Turtlebot3 packages as we’ll use this robot as an example. Please turn the [ros.com since original gmapping source and ROS openslam_gmapping package has been updated to the BSD-3 license, I think we have . Package Summary. answered Jun 19 '12. Known supported distros are highlighted in the buttons above.list, to set domains of repository URLs to old-releases for all . 31395 134 284 498.No, slam_gmapping doesn't work with multirobot systems.answered Feb 23 '11.

Cartographer is a system that provides real-time simultaneous localization and mapping (SLAM) in 2D and 3D across multiple platforms and sensor configurations.Read more about other SLAM methods. So the first thing you should do when you see these errors is to load up rxconsole .The SLAM constructor framework provides common functionality and classes that may be used to create custom SLAM algorithms (currently only 2D laser scan-based methods are supported).Changelog for package slam_gmapping 1. hector_mapping is a SLAM approach that can be used without odometry as well as on platforms that exhibit roll/pitch motion (of the sensor, the platform or both).